诺芯盛为您提供功率器件,高压MOS管、第三代半导体GaN、SiC等信息,敬请关注!
QQ:88650341(林生)

咨询热线:185-2081-8530(林生)
咨询热线:185-2081-8530(林生)

【摘要】机器狗关节电机控制需采用CANFD总线提升带宽,以适应高电压、高响应需求,同时注意MOS管击穿电压余量设计。
机器狗关节电机的控制效果不仅取决于MOS管本身,还与整个通信架构密切相关。传统CAN2.0总线由于带宽限制,通常需要采用4组独立总线,每组控制一条腿的3个电机。这种设计虽然成熟,但随着机器狗功能性需求增加,背挂执行器和传感器的增多,4路CAN2.0总线已显力不从心。

新一代解决方案转向CANFD总线,其1M/5M的带宽使得单路总线即可控制两条腿的电机。这对于100V高压电机系统尤为重要,因为更高的电压意味着更快的响应速度和更大的驱动力,需要更高效的数据传输能力来匹配。就像城市交通系统,仅仅有高性能跑车(高效mos管)不够,还需要宽阔的高速公路(高带宽总线)才能充分发挥其性能。
在选择100V mos管用于机器狗关节控制时,击穿电压的余量设计是关键考量因素。由于电机控制的频率往往较低,会导致较低的振铃,因此输入电源轨和FET击穿之间的裕度可以适当放宽。一般来说,BV DSS(漏源击穿电压)和最大输入电压V IN之间保持40%的缓冲是一个合理的标准。

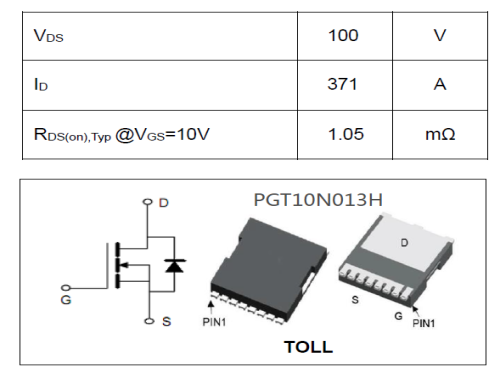
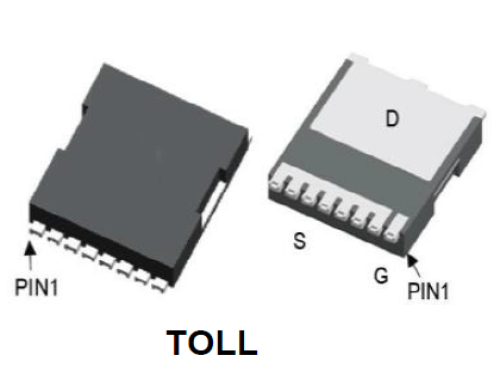
机器狗关节的100V MOS管PGT10N013H采用TOLL封装,RDS(on),TypVGS 10V :1.05mΩ低内阻,Id:371A电流
产品推荐Product recommendation
 二维码扫一扫
二维码扫一扫
诺芯盛备案号:粤ICP备2022029173号-4 热销型号:ASDM30C16E-R ASDM3010S-R APM20G02LI AGM311MN

 18520818530
18520818530 